подводный аппарат
подво́дный аппарат
Прочная, герметичная камера, обычно небольших размеров, оснащённая техническими средствами для проведения научных исследований, поиска, выполнения подводных работ и других задач во взаимодействии с обеспечивающим судном-носителем. В зависимости от предельной глубины погружения различают подводные аппараты малых глубин (до 200 м), средних (до 2000 м), больших (до 6000 м) и предельных глубин. Подводные аппараты бывают неавтономные, связанные при погружении с обеспечивающим судном канатом или трос-кабелем и автономные, способные погружаться, всплывать и перемещаться самостоятельно.
К неавтономным подводным аппаратам относятся гидростаты, батисферы и подводные роботы. Гидростаты – подводные камеры цилиндрической формы, рассчитанные на пребывание 1–2 человек. Строились в СССР (1944—57), Японии (1951), Италии (1957). Гидростаты имеют иллюминаторы, оснащены прожекторами, фотоаппаратурой, имеют системы регенерации воздуха, глубиномеры, приборы контроля и др. Японский гидростат «Куро-Сио» имел гребной винт и рули для ограниченного перемещения у дна. Все гидростаты снабжены аварийным балластом для всплытия. С помощью гидростатов проводят океанографические и другие исследования, изучают условия рыболовства. Глубина погружения гидростатов 200–600 м, время пребывания под водой – несколько часов. Батисфера, в отличие от батискафа, имеет сферический корпус. На батисфере «Верх прогресса» (США, 1929 г.) Бартон установил рекорд погружения для неавтономных подводных камер – 1360 м. Подводные роботы предназначены для выполнения разнообразных работ – поиск и подъём затонувших торпед и другого оружия, выполнения подводных работ, осмотр подводной части корпусов судов и др. Подводные роботы имеют телевизионное или кабельное управление, снабжены средствами передвижения (гребными винтами для плавания или гусеничными для перемещения по грунту), осветительными приборами, рычажными захватами, манипуляторами, копирующими действие руки, и др.
Автономные подводные аппараты по способу погружения и всплытия делятся на 3 группы: батискафы (погружаются и всплывают за счёт изменения объёмного водоизмещения и массы аппарата; глубина погружения может достигать 11 000 м); мезоскафы (перемещение осуществляется за счёт тяги гребных винтов; погружаются на 5000–7000 м); исследовательские подводные лодки (погружаются и всплывают за счёт приёма балласта и продувки балластных цистерн; при глубинах погружения более 1500 м на них устанавливают винты и используют твёрдый балласт). Отдельную группу составляют батипланы – используемые на малых глубинах транспортные средства для перемещения водолазов на буксире или с помощью гребных винтов.
Погружение батискафа происходит вследствие увеличения его веса за счёт поступления забортной воды в поплавок, а всплытие – в результате сброса твёрдого балласта (обычно железной дроби). Из батискафов наиболее известен «Триест», на котором Ж. Пиккар и Д. Уолш в 1960 г. достигли рекордной глубины 11 000 м в районе Марианского жёлоба в Тихом океане. «Триест», как и другие батискафы, состоит из несущего корпуса (поплавка) и прочной сферы. В стальном корпусе длиной 15.24 м и массой 15 т размещены две балластные цистерны ёмкостью по 6 мі, шесть цистерн для бензина общей ёмкостью 113.3 мі (из них средняя – уравнительная), а также два бункера с железной дробью массой 9 т. Прочная герметичная сфера с толщиной стенок 150 мм и массой 10.5 т имеет входной люк и иллюминатор, подвешена к несущему корпусу. В ней размещаются различные приборы, аккумуляторные батареи для питания двух гребных реверсивных электродвигателей, наружного прожектора, внутреннего освещения и приборов. Скорость хода батискафа в подводном положении 0.25 узла (ок. 450 м/ч), запас хода 16 ч. Экипаж 2 человека. Уравнительная цистерна имеет в нижней части отверстие для впуска забортной воды, а в верхней – вентиль для выпуска бензина при погружении. Твёрдый балласт в виде дроби диаметром 3 мм предназначен для регулирования веса батискафа, возрастающего за счёт забортной воды в уравнительной цистерне; балласт может быть сброшен в аварийной ситуации. Исследовательские подводные лодки строят в США, Японии, России, Франции и других странах. Они имеют водоизмещение от нескольких тонн до нескольких десятков тонн, могут погружаться на глубину до 4 км и более; экипаж 1–4 человека. Движение обеспечивают гребные винты или водомётные движители. Автономность плавания подводных лодок от нескольких часов до суток и более. Научно-исследовательская подводная лодка «Дениза» («ныряющее блюдце», Франция) имеет массу 3.5 т, глубину погружения 300 м, автономность 24 ч и предназначена для изучения рельефа дна, обслуживания океанографической аппаратуры, осмотра подводных кабелей и трубопроводов. Строят также аппараты для подводных экскурсий. Экскурсионный подводный аппарат «Нептун» (Россия) принимает на борт 42 человека, оборудован 22 обзорными иллюминаторами. Скорость движения аппарата 0.5–3 узла (1–5.5 км/ч), экипаж 3 человека.
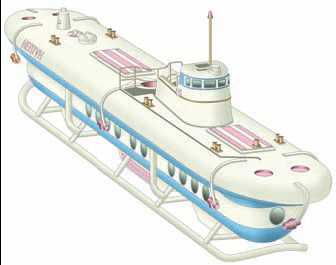
Подводный аппарат «Нептун»
Значения в других словарях
- ПОДВОДНЫЙ АППАРАТ — ПОДВОДНЫЙ АППАРАТ, небольшое судно для подводных исследований и подводных работ. Современные подводные аппараты произошли от простых устройств. Водолазные колокола были приспособлениями с открытым дном, в которых людей погружали в воду. Научно-технический словарь
- Подводный аппарат — (a. submarine unit; н. Unterwassergerat; ф. appareil sous-marin; и. equipo submarino) — судно или техн. устройство, перемещающееся в толще воды и (или) по дну и используемое для науч. Горная энциклопедия
